


In recent times, with the numerous improve in house launch actions, the variety of deorbited spacecraft has sharply risen, posing a severe influence on each energetic orbiting spacecraft and future house actions. Conventional rope internet seize methods, serving as a know-how for actively deorbiting spacecraft, maintain huge potential in mitigating and clearing house particles.
Nevertheless, rope methods face challenges corresponding to issue in sustaining form over prolonged intervals, susceptibility to self-entanglement, vitality losses, and a discount within the efficient seize space. In distinction, skinny movies can fold and unfold alongside common shapes, providing larger flexibility and reliability in comparison with tethers. They emerge as an efficient resolution to the entanglement difficulty and current a promising methodology for house particles mitigation and removing.
In a assessment article lately published in Area: Science & Expertise, Professor Wei Cheng’s staff at Harbin Institute of Expertise, in collaboration with researchers from Beijing Institute of Management Engineering and Benha College, has designed a skinny movie seize pocket system.
Nevertheless, the versatile construction of this technique is susceptible to vital deformation and vibrations throughout movement, leading to appreciable interference with spacecraft operations. To quantitatively analyze these disturbances, this examine focuses on the dynamic modeling and perspective management of the skinny movie pocket seize system.
The analysis entails the event of a quick nonsingular terminal sliding mode controller (FNTSM) and a set time dilation observer (FxESO) built-in into an attitude-tracking management legislation. The effectiveness of the controller is validated via the institution of a digital prototype. This analysis supplies theoretical assist for the longer term in-orbit utility of the system.

Firstly, set up the mannequin of the seize pocket system. Using a big versatile membrane construction supported by inflatable rods, the higher half types an octagonal prism, offering a big envelope for the seize mechanism, whereas the decrease half takes on a cylindrical form.
The system’s deployment and retraction are achieved via the adjustment of inflation and deflation utilizing inflatable versatile joints. The working means of the system is principally in 3 phases. First, the spacecraft system is pushed by the excessive thrust engine to method the captured goal. Then, inflatable versatile joints are inflated to envelop the goal. Lastly, the service spacecraft actively maneuvers to pull the captured goal into the graveyard orbit.
Subsequent, use the Absolute Nodal Coordinate Formulation (ANCF) to ascertain the dynamic mannequin of the skinny movie pocket seize system. Make use of high-order ANCF components with 8 nodes to explain the movement of the movie floor, representing the worldwide place vector via interpolation polynomials Φi (xi, yi).
Describe the pressure of fabric factors utilizing the Inexperienced–Lagrange pressure tensor and substitute it into the worldwide place vector gradient tensor Ji to derive the factor’s movement equations. Make use of the precept of digital work to infer the factor’s kinematic equations. Moreover, introduce the controller u, angular velocity ω(ω), and unit quaternion q.
Derive the derivatives of the perspective monitoring errors, together with angular velocity error ωe and perspective rotation matrix Aqe. Lastly, incorporating the results of the spacecraft’s second of inertia JR and exterior disturbance d, derive the spacecraft’s perspective dynamic equations.

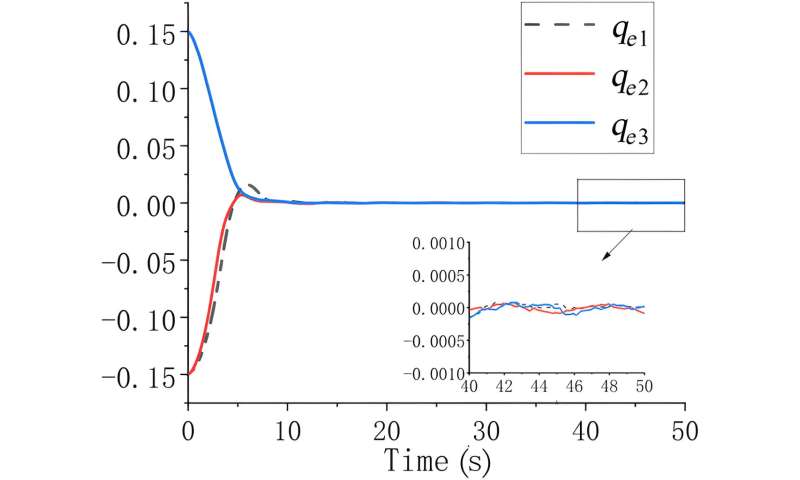
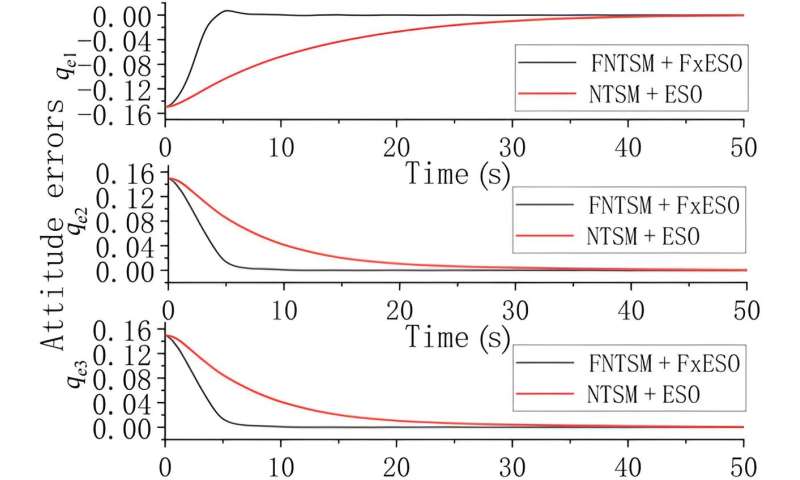
Angle error qe curves. Credit score: Area: Science & Expertise Comparability between the FNSMC + FxESO and NTSM + ESO. Credit score: Area: Science & Expertise
Subsequently, the creator, constructing upon nonlinear sliding mode management, has devised a Quick Terminal Sliding Mode (FTSM) floor F. To stop singularity points in FTSM, a Quick Nonsingular Terminal Sliding Mode (FNTSM) floor F is designed when |qei| < ψ.
The introduction of a Mounted-Time Prolonged State Observer (FxESO) entails designing the dynamic equations for commentary error, enabling estimation of uncertainties. Lastly, primarily based on FTNSM and FxESO, a spacecraft controller is designed to attain convergence and stability inside a finite time.
Following that, the creator established a digital prototype and carried out numerical simulation analyses of the related dynamics and management theories. The examine revealed that, after spacecraft perspective maneuvers, the system progressively stabilized.
Nevertheless, there have been nonetheless vibrations within the versatile rods, stopping the membrane from being totally tightened, leading to steady wrinkles on the membrane floor. Moreover, the FNTSM + FxESO controller was in contrast with the Nonsingular Terminal Sliding Mode (NTSM) + Growth Observer (ESO) controller, and the perspective errors underneath this controller had been analyzed.
The outcomes point out that the FNTSM + FxESO controller brings the spacecraft to the specified perspective after 10 seconds, which is roughly 25 seconds quicker in comparison with the NTSM + ESO controller. This considerably improves the convergence pace of the system’s perspective error.
Moreover, this controller can successfully suppress high-amplitude vibrations, protecting the steady-state perspective error on the magnitude of 10-4. This demonstrates the excessive effectivity, precision, and stability efficiency of the proposed controller.
Extra data:
Zhuoran Huang et al, Dynamics and FNTSM Management of Spacecraft with a Movie Seize Pocket System, Area: Science & Expertise (2023). DOI: 10.34133/space.0079
Offered by
Beijing Institute of Expertise Press Co., Ltd
Quotation:
Analysis on dynamics and FNTSM management of spacecraft with a movie seize pocket system (2024, February 28)
retrieved 28 February 2024
from
This doc is topic to copyright. Other than any truthful dealing for the aim of personal examine or analysis, no
half could also be reproduced with out the written permission. The content material is offered for data functions solely.










{kind=link}